Shape Perception as Bayesian Inference - Supplementary Materials
This page contains the supplementary materials for our paper
Erdogan G., Jacobs R. A. (in prep.) Shape Perception as Bayesian Inference of 3D Object-centered Representations.
Code for our 3D shape inference model is available online at https://github.com/gokererdogan/psych_review_2017.
Paperclip Stimuli
Here we provide the full set of paperclip stimuli used in our view-dependency simulations.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
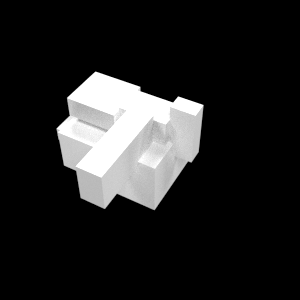
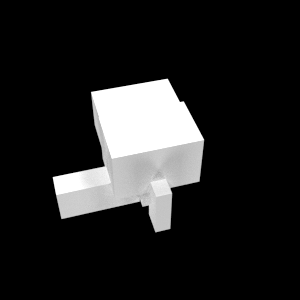
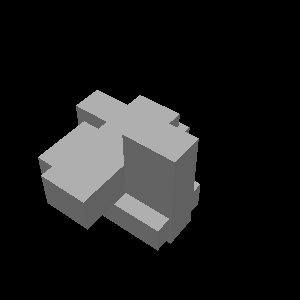
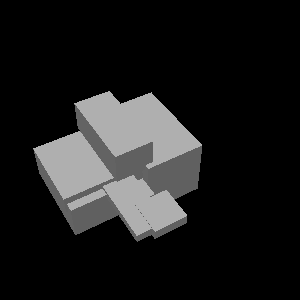
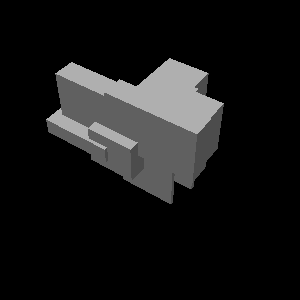
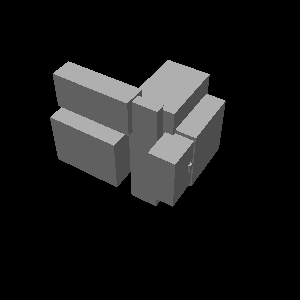
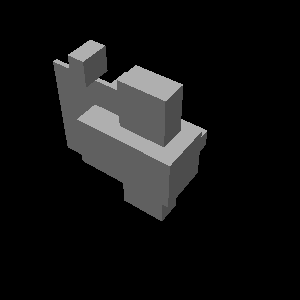
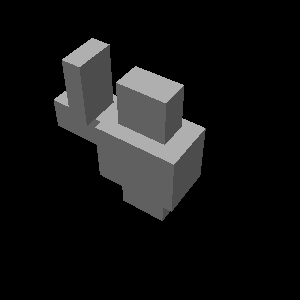
Experimental Stimuli
In the paper, we only show one example stimuli. Below you can see the full set of 90 images used in the experiment. Variations cs: change part size, ap: add part, rp: remove part, mf: change docking face of part. d2 (depth 2) and d3 (depth 3) refer to the level at which the manipulation is applied.
| Base | cs d2 | cs d3 | ap d2 | ap d3 | rp d2 | rp d3 | mf d2 | mf d3 |
|---|---|---|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
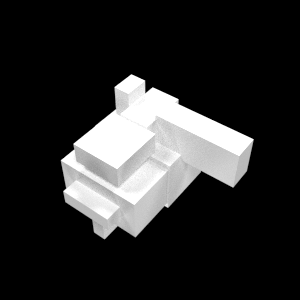
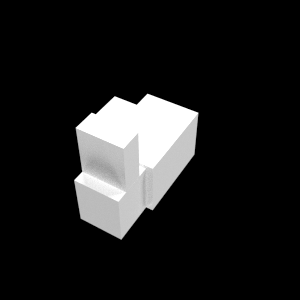
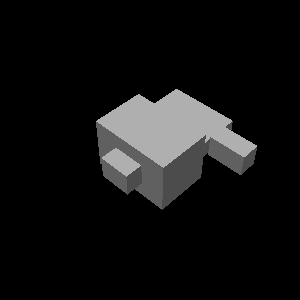
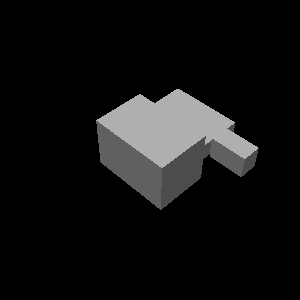
Results
Samples
Here are some more examples of samples from our model.
| Input | Sample1 | Sample2 | Input | Sample1 | Sample2 | |
|---|---|---|---|---|---|---|
|
 |
 |
|
 |
 |
|
|
 |
 |
|
 |
 |
|
|
 |
 |
|
 |
 |
|
|
 |
 |
|
 |
 |
|
|
 |
 |
|
 |
 |